
Simulador de Cirugías mínimamente invasivas
Realidad virtual para simuladores quirúrgicos mas flexibles y económicos.
Hoy en día las técnicas de cirugía mínimamente invasivas se utilizan cada vez más como una alternativa a un procedimiento quirúrgico de cirugía abierta, ya que en este tipo de intervenciones se disminuyen los riesgos quirúrgicos, se acortan las incapacidades post-operatorias y se reducen el tiempo de hospitalización al igual que las posibles secuelas físicas. Sin embargo la destreza y habilidad que los cirujanos requieren para realizar tales procedimientos es alta y las metodologías de entrenamiento no son las adecuadas.
Entre estas metodologías podemos encontrar entrenamiento en animales, entrenamiento en la sala de cirugía con pacientes reales, libros, entre otros, sin embargo dichas metodologías poseen ciertas desventajas como costos, implicaciones éticas, entre otras. En las ultimas dos décadas ha sido planteada y explorada la realidad virtual como herramienta para la construcción de simuladores quirúrgicos mas flexibles y económicos, sin embargo aun son muy costosos y están limitados solo a unos cuantos procedimientos quirúrgicos.
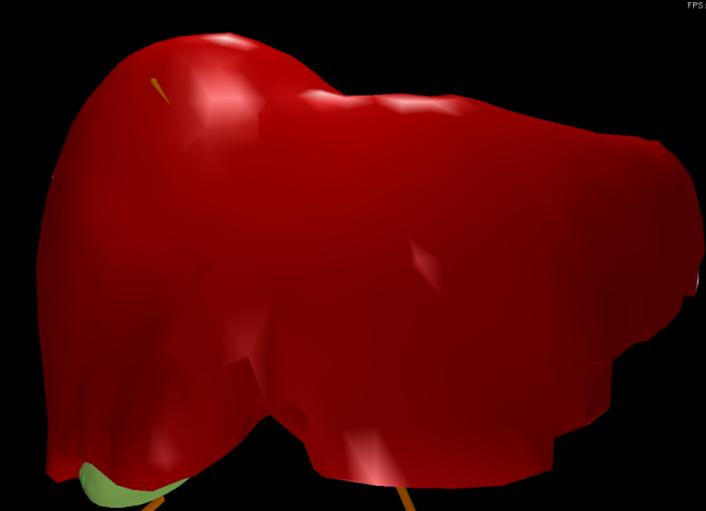
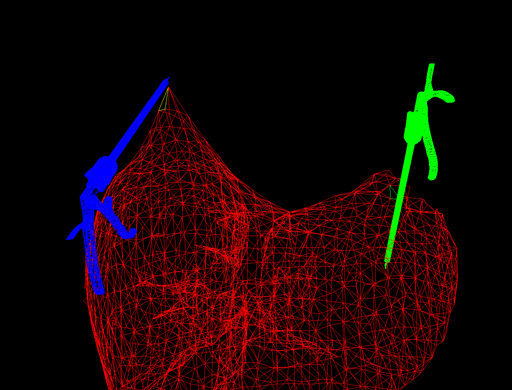
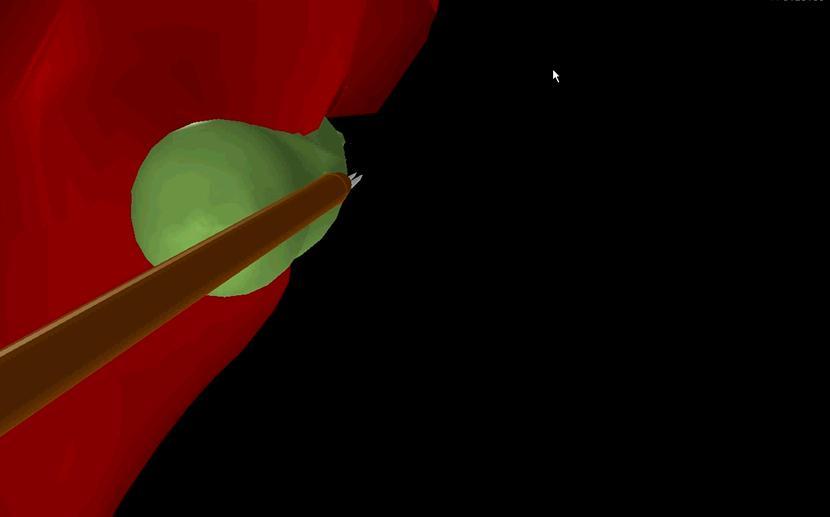
De esta manera en el presente proyecto se desarrolló la primera fase de un simulador de cirugía mínimamente invasiva basado en realidad virtual, para apoyar la formación de cirujanos en los procedimientos quirúrgicos. Dentro de los procedimientos que puede realizar el cirujano en el simulador en este momento son la movilidad de los instrumentos y del laparoscopio, manipulación y agarre de estructuras anatómicas. Para cumplir con estas tareas se reconstruyó tridimensional el hígado a partir de las imágenes del proyecto “Visible Human” y se creo un modelo tridimensional de los instrumentos laparoscópicos, se implementó en la GPU un modelo físico que simulara la deformación del órgano al contacto con los instrumentos, también se desarrolló un algoritmo de detección de colisiones para determinar cuando el objeto esta en contacto con el órgano y finalmente se diseño y construyo una interfaz física que simulara las condiciones reales de la cirugía, y así el cirujano pudiera interactuar de una forma intuitiva con el ambiente virtual. A dicha intefaz física se le integraron dos dispositivos de retroalimentación con el fin de adicionar una percepción de fuerza del ambiente virtual.
El proyecto en este momento finalizó esta etapa, sin embargo en otros proyectos relacionados se estan explorando modalidades colaborativas con el fin de soportar el aprendizaje remoto de habilidades quirúrgicas.
Imágenes

Responsable