
Minimally Invasive Surgery Simulator
Virtual reality for surgical simulators more flexible and low cost.
Nowadays minimally invasive surgery techniques are very used like an alternative to an open surgery procedures, because in this type of surgery is decreased the surgical risk, the time of post-operatory recovery is shortened, is decreased the hospitalization time and in the same way the possible physical sequel. However the skills required for the surgeons to carry out a minimally invasive surgery are difficult and the training methodologies are not available.
In the conventional training methodologies we can find training in animals, training using a surgical room with real patients, books, among others, however this methodologies have some disadvantages such as costs, ethical implications, among others. In the last two decades have been raised and explored the virtual reality like a tool used in the development of more flexible and economics surgical simulators, however these are very expensive and have limited surgical procedures.
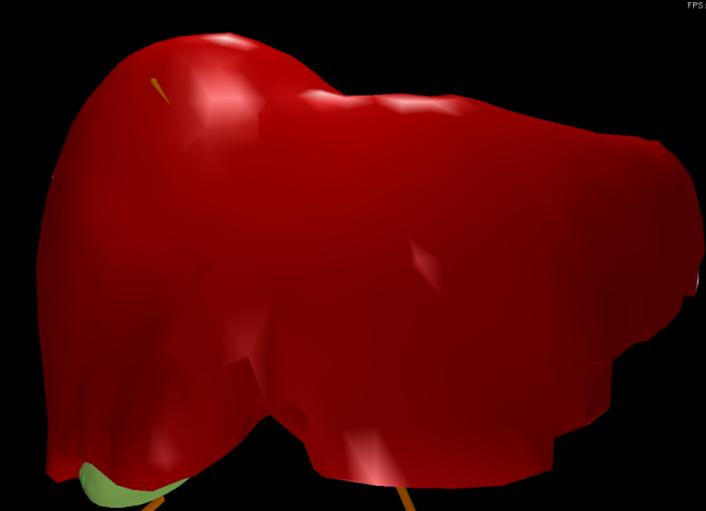
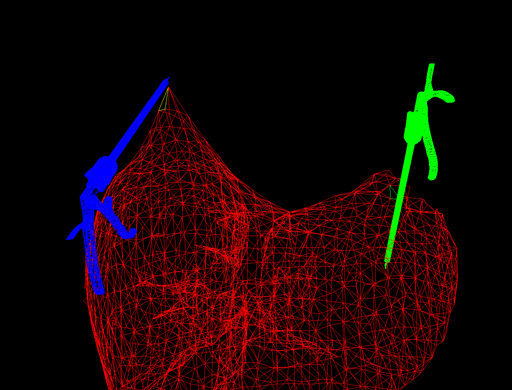
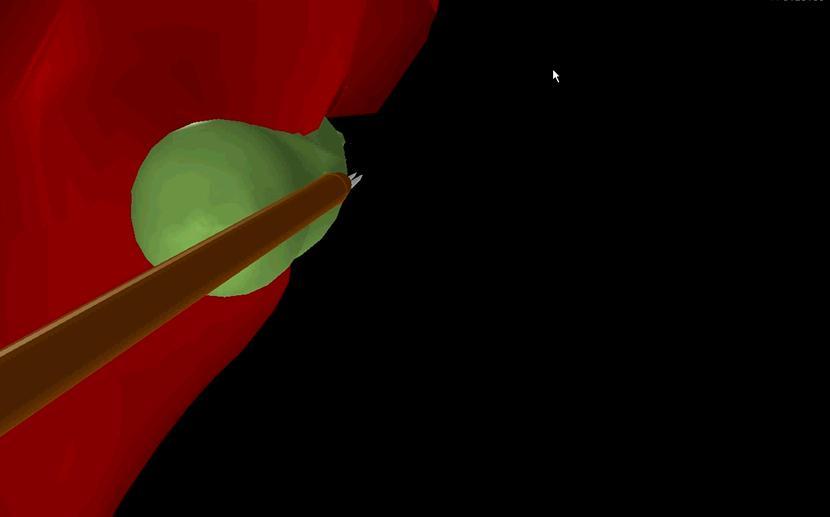
In this way in the present project is developed the first phase of a minimally invasive surgical simulator based on virtual reality, to support the training of the surgeon in this procedures. At this moment the surgeon in the simulator can move the instruments and the laparoscope, manipulate and grasp the anatomical structures. To accomplished with this task is carried out a tridimensional reconstruction of the liver using the Visible Human Project pictures and is developed a tridimensional model of the laparoscopic tools. Also it is implemented on the GPU a physical model to simulate the deformation of the organs when this is in contact with the surgical tools. Additionally is developed a collision detection algorithm to determine when the object is in contact with the organ and finally is designed and built a physical interface to simulate the real conditions of the surgery, and so the surgeon can interact in an intuitive way with the virtual environment. We integrate two haptic feedback devices to the physical interface in order to add the force perception to the environment.
At this moment the project have finalized, however we are exploring new collaborative networked modalities in order to support the remote learning of the surgical skills.
Pictures

Person in charge